Протокол взаимодействия с пультом управления ПУ-СП¶
Изделие имеет протокол, соответствующий основным требованиям стандарта J1939.
Изделие может быть установлено в систему сельскохозяйственной или подобной техники.
Пульт управления ПУ-СП обладает интерфейсом CAN со скоростью передачи данных 500 кБит/с с 19-битным идентификатором.
Пульт управления ПУ-СП в сети CAN имеет адрес устройства 0xF9 (249 dec) .
Порядок байт: В протоколе выполняется использование порядка байт Little Endian, что означает, что младший байт данных хранится по адресу, предшествующему старшему байту.
Порядок бит: Биты в протоколе считаются справа налево. То есть, наиболее значимый бит (MSB) номер 8, а наименее значимый бит (LSB) — номер 1.
В таблицах ниже, если не оговорено особо, все параметры размером один байт имеют тип unsigned char. Параметры размером четыре байта имеют тип unsigned long.
Идентификаторы сообщений CAN, отправляемые Пультом управления ПУ-СП¶
Таблица 1. Управление кнопками навигации
| Частота передачи | Единоразово |
| PGN | 65361 (0xFF51) |
| Длина сообщения | 8 |
| Адрес назначения | FF |
| Приоритет | 6 |
| Байт | Бит | Значение | Кнопка |
|---|---|---|---|
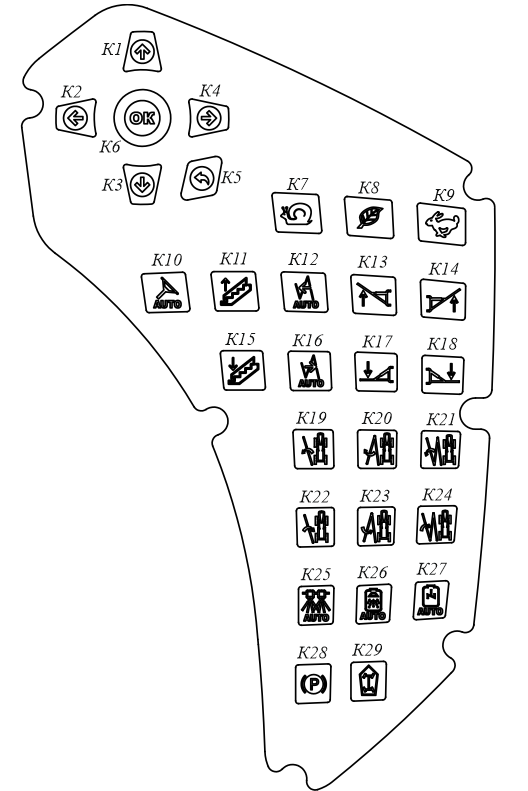
| 1 | - | Перемещение вверх | (К1) |
| 2 | - | Перемещение влево | (К2) |
| 3 | - | Перемещение вниз | (К3) |
| 4 | - | Перемещение вправо | (К4) |
| 5 | - | Назад/Отмена/Выход | (К5) |
| 6 | - | Подтверждение | (К6) |
0 — кнопка не нажата
1 — кнопка нажата
2 — ошибка индикации
3 — не поддерживается
Таблица 2. Управление лестницей
| Частота передачи | Единоразово |
| PGN | 65241 (0xFED9) |
| Длина сообщения | 8 |
| Адрес назначения | FF |
| Приоритет | 6 |
| Байт | Бит | Значение | Кнопка |
|---|---|---|---|
| 1 | 1-2 | Подъем лестницы | (К11) |
| 1 | 3-4 | Опускание лестницы | (К15) |
00b = Канал выключен
01b = Канал включен
10b = Ошибка
11b = Не доступно
Таблица 3. Управление режимами движения
| Частота передачи | Единоразово |
| PGN | 64718 (0xFCCD) |
| Длина сообщения | 8 |
| Адрес назначения | FF |
| Приоритет | 6 |
| Байт | Бит | Значение | Кнопка |
|---|---|---|---|
| 1 | - | Выбранный режим движения: 0 - Активировать управление максимальной тяговой мощностью (К9) 1 - Активировать управление постоянной частотой вращения ВОМ (не поддерживается) 2 - Активировать управление соотношением теоретической скорости и частотой вращения ВОМ (не поддерживается) 3 - Активировать управление минимальной частотой вращения двигателя (К7) 4 - Активировать управление топливной экономичностью двигателя (К8) 5 - Активировать управление максимальной мощностью гидравлической системы (не поддерживается) 6 - Активировать управление максимальной электрической мощностью (не поддерживается) 7 - 252 - Зарезервировано 253 - Зарезервировано 254 - Ошибка 255 - Недоступно |
(К7) (К8) (К9) |
Таблица 4. Управление штангой
| Частота передачи | Единоразово |
| PGN | 61184 (0xEF00) |
| Длина сообщения | 8 |
| Адрес назначения | FF |
| Приоритет | 6 |
| Байт | Бит | Значение | Кнопка |
|---|---|---|---|
| 1(XID) | - | 1 | |
| 2 | 1-4 | Управление режимом работы штанги 0 - нет управления/выключить режим 1 - Ручное управление штангой 2 - Зарезервировано 3 - Автоматическое управление высотой штанги (Режим 1 - подъем/опускание крыльев) (не поддерживается) 4 - Автоматическое управление высотой штанги (Режим 2 - управление перекосом и высотой) 5 - Автоматическое управление высотой штанги (Режим 3 - полное управление) 6 - Автоматическое раскладывание штанги (К12) 7 - Автоматическое складывание штанги (К16) 8 - Автоматическая калибровка положений штанги (не поддерживается) 9 - Автоматическое минимальное предустановленное значение высоты штанги 10 - Автоматическое максимальное предустановленное значение высоты штанги |
(К12) (К16) |
| 2 | 5-6 | Состояние команды: 0 - нет управления 1 - управление 2 - резерв 3 - не задано |
|
| 3 | 5-6 | Команда ручного управления: 0 - Нет команды 1 - Подъем штанги (не поддерживается) 2 - Опускание штанги (не поддерживается) 3 - Управление наклоном штанги влево (не поддерживается) 4 - Управление наклоном штанги вправо (не поддерживается) 5 - Подъем левого крыла штанги (К13) 6 - Опускание левого крыла штанги (К17) 7 - Подъем правого крыла штанги (К14) 8 - Опускание правого крыла штанги (К18) 9 - Раскладывание первых секций штанги (К19) 10 - Складывание первых секций штанги (К22) 11 - Раскладывание вторых секций штанги (К20) 12 - Складывание вторых секций штанги (К23) 13 - Раскладывание третьих секций штанги (К21) 14 - Складывание третьих секций штанги (К24) 15-254 - Ошибка 255 - Не задано |
(К13) (К14) (К17) (К18) (К19) (К20) (К21) (К22) (К23) (К24) |
Таблица 5. Управление системой автоматического вождения
| Частота передачи | Единоразово |
| PGN | 65360 (0xFF50) |
| Длина сообщения | 8 |
| Адрес назначения | FF |
| Приоритет | 6 |
| Байт | Бит | Значение | Кнопка |
|---|---|---|---|
| 1 | - | Управление системой автоматического вождения : - Выключить систему автоматического вождения (0) - Включить систему автоматического вождения (1) - Резерв (2) - Не задано (3) |
(К10) |
| 2 | - | Управление режимом подруливания колесами задней оси : - Выключить режим подруливания колесами задней оси (0) - Включить режим подруливания колесами задней оси (1) - Резерв (2) - Не задано (3) |
(К29) |
Таблица 6. Управление режимами работы системы вылива
| Частота передачи | 100 |
| PGN | 65345 (0xFF41) |
| Длина сообщения | 8 |
| Адрес назначения | FF |
| Приоритет | 6 |
| Байт | Бит | Значение | Кнопка |
|---|---|---|---|
| 1 | 1-4 | Управление режимами работы контроллера системы вылива: - Нет управления/Режим простоя (0) - Режим слива остатков жидкости из основной емкости (1) - Режим перемешивания (2) (К27) - Режим автоматической заправки собственным насосом основной емкости (3) - Режим заправки внешним насосом основной емкости (4) - Режим автоматической промывки (5) (К26) - Режим внесения химикатов посредством эдуктора (6) - Режим продувки штанги (7) - Режим опрыскивания (8) - Автоматическое поддержание заданной нормы опрыскивания (9) (К25) - Приостановка процесса опрыскивания (10) - Нет информации (15) |
(К25) (К26) (К25) |
| 1 | 5-6 | Состояние команды: - нет управления / СТОП (0) - управление / ПУСК (1) - ПОДГОТОВКА (2) - не задано (3) |
Таблица 7. Управление стояночным тормозом
| Частота передачи | Единоразово |
| PGN | 57344 (0xE000) |
| Длина сообщения | 8 |
| Адрес назначения | FF |
| Приоритет | 6 |
| Байт | Бит | Значение | Кнопка |
|---|---|---|---|
| 1 | - | Управление стояночным тормозом : - Cнятие со стояночного тормоза (0) - Постановка на стояночный тормоз (1) - Резерв (2) - Не задано (3) |
(К28) |
Идентификаторы сообщений CAN, принимаемые Пультом управления ПУ-СП¶
| Идентификатор | XID | Частота передачи | Источник | Описание |
|---|---|---|---|---|
| 65265 (0xFEF1) | - | 100 | КУТ | Состояние стояночного тормоза: - Стояночный тормоз не установлен (0) - Стояночный тормоз установлен (1) - Ошибка (2) - Недоступно (3) |
| 64717 (0xFCCD) | - | 500 | КМ | [1] Выбранный режим движения: - Активировано управление максимальной тяговой мощностью (0) - Активировано управление постоянной частотой вращения ВОМ (не поддерживается) - Активировано управление соотношением теоретической скорости и частотой вращения ВОМ (не поддерживается) - Активировано управление минимальной частотой вращения двигателя (3) - Активировано управление топливной экономичностью двигателя (4) - Активировано управление максимальной мощностью гидравлической системы (не поддерживается) - Активировано управление максимальной электрической мощностью (не поддерживается) - Ошибка (7-254) - Недоступно (255) |
| 65370 (0xFF5A) | - | 100 | КА, ТСВ | Состояние системы автоматического вождения: [1] Состояние системы автоматического вождения : - Система автоматического вождения выключена (0) - Система автоматического вождения включена(1) - Резерв (2) - Не задано (3) [2] Состояние режима подруливания колесами задней оси : - Режим подруливания колесами задней оси выключен (0) - Режим подруливания колесами задней оси включен (1) - Резерв (2) - Не задано (3) |
Обновлено Андрей Матвеев 18 дня назад · 4 изменени(я, ий)